
ロボット掃除機、自動運転車、ドローン、スマートフォンの顔認証――これらの先進的な機器に共通して使われている重要な技術が「距離センサー」です。距離センサーは、対象物までの距離を測定するための装置であり、機械が周囲の環境を理解するための基礎となる存在です。
一口に距離センサーといっても、その方式は複数あります。代表的なのが LiDAR(ライダー)・ToF・超音波センサー です。それぞれ原理や得意分野が異なり、用途に応じて使い分けられています。
この記事では、これら3種類の距離センサーについて、仕組み・特徴・強みと弱み・実際の使われ方までを体系的に解説します。
距離センサーとは何か
距離センサーとは、物体との距離を測定するセンサーの総称です。役割はシンプルですが極めて重要で、機械に「周囲を把握する能力」を与えます。
人間は目や触覚で距離を認識しますが、機械はセンサーによって距離を数値として取得します。この数値があることで、機械は初めて
・障害物を避ける
・空間を把握する
・位置を推定する
・物体を認識する
といった動作が可能になります。
距離センサーは、ロボットや自動運転分野において「目」に相当する存在だと言えます。
距離測定の基本原理
距離センサーの基本はとてもシンプルです。
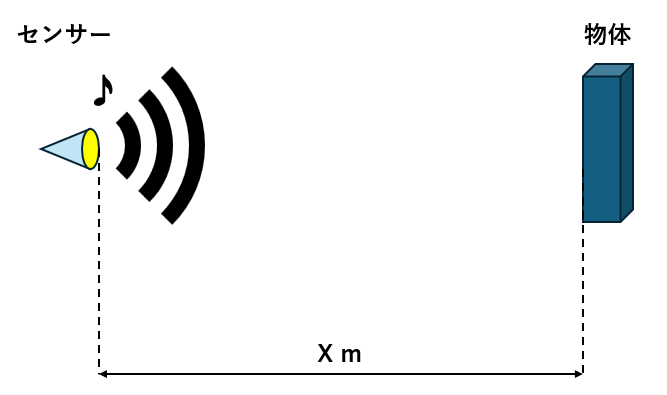
1つの点から何かを「発信」し、それが物体に当たって「跳ね返り」、戻ってくるまでの時間を測る。
これだけです。
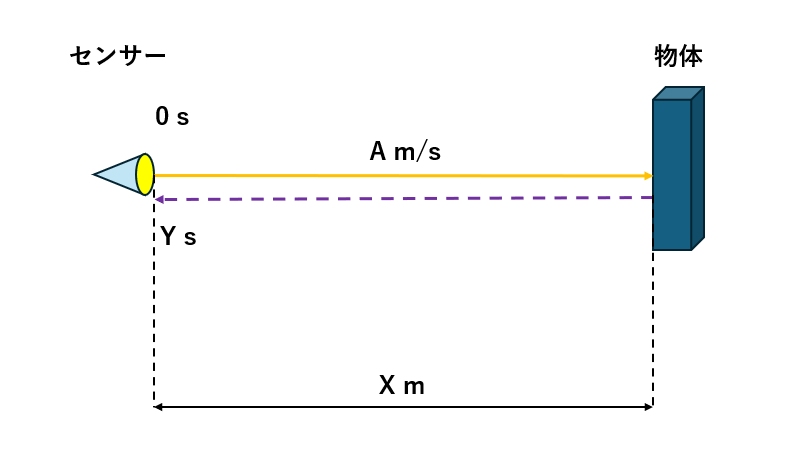
たとえば上図のように、
・左側にセンサー本体がある
・右側に物体がある
・センサーからまっすぐ波(光や音)が出る
・物体に当たって反射し、同じ道を戻ってくる
センサーは、「出した時刻」と「戻ってきた時刻」の差を測ります。
光や音の進む速さは決まっているため、その時間差から距離を逆算できるのです。
LiDAR・ToF・超音波センサーはいずれもこの考え方を基盤にしていますが、「何を飛ばすか」が異なります。
LiDARとは
仕組み
LiDARはレーザー光を使って距離を測定するセンサーです。レーザーを発射し、対象物に当たって戻るまでの時間から距離を算出します。
・センサーから細いレーザー線が1本出る
・壁や家具に当たって反射する
・戻ってきた時間を測る
という流れです。
レーザーは指向性(まっすぐ進む性質)が高く、非常に細いビームを扱えるため、「どの方向に、どの距離で物体があるか」をかなり正確に測れます。これにより精密な測定が可能でとなります。
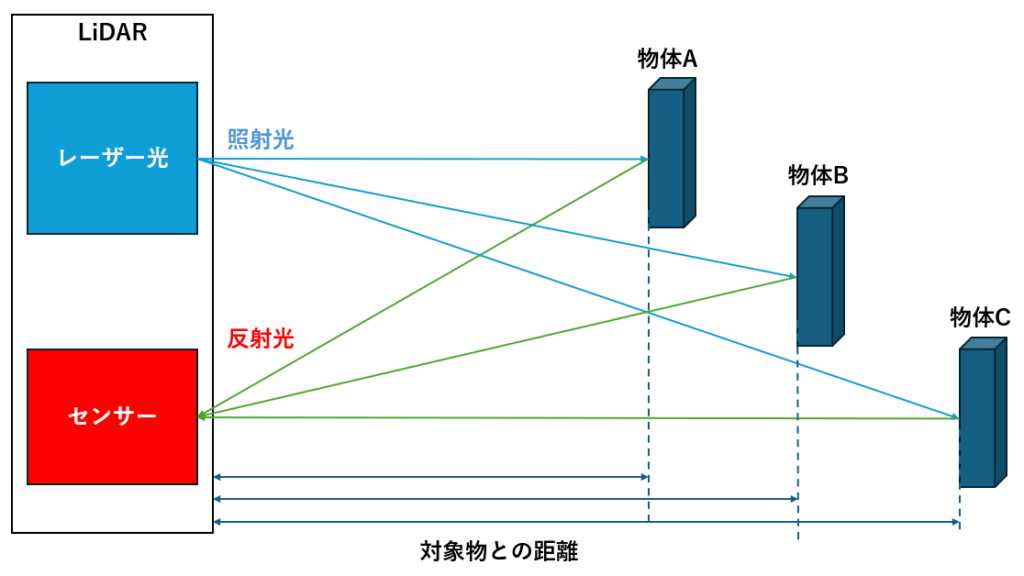
さらに、これをぐるっと回転しながら何百回、何千回と行うことで、部屋の形を点の集まり(点群データ)として取得します。
ロボット掃除機が部屋の地図を作れるのは、この仕組みのおかげです。

特徴
LiDARの最大の強みは精度です。
・高精度な距離測定
・長距離測定が可能
・空間を点群データとして取得できる
点群データとは、空間を多数の点で表現した3D情報のことです。これにより、周囲環境を詳細に地図化できます。
主な用途
・ロボット掃除機のマッピング
・自動運転車
・ドローン測量
・地形スキャン
特にロボット掃除機では、部屋の形状を正確に把握するためにLiDARが使われています。
弱点
・コストが高い
・強い日光で誤差が出る場合がある
・可動部があるタイプは摩耗リスク
そのため、高精度が必要な場面に限定して採用されることが多いです。
ToFセンサーとは
仕組み
ToF(Time of Flight)センサーは、主に赤外線を使って距離を測定します。原理はLiDARと似ていますが、より小型で低コストな設計が可能です。
・センサーから光がやや広がる形で出る
・近くの物体に当たって戻る
・その時間を測る
LiDARほど細い線ではないため、「超精密」ではありませんが、
・人がいるか
・顔が近いか
・手をかざしたか
といった検知には十分です。
特徴
・小型化しやすい
・消費電力が低い
・近距離測定が得意
スマホの顔認証やジェスチャー操作にも実装しやすいのが特徴です。
主な用途
・スマホの顔認証
・ジェスチャー認識
・AR/VR
・室内位置認識
ロボット掃除機では補助センサーとして使われます。
弱点
・長距離測定が苦手
・精度はLiDARに劣る
・屋外でノイズを受けやすい
精密マッピングには向きません。
超音波センサーとは
仕組み
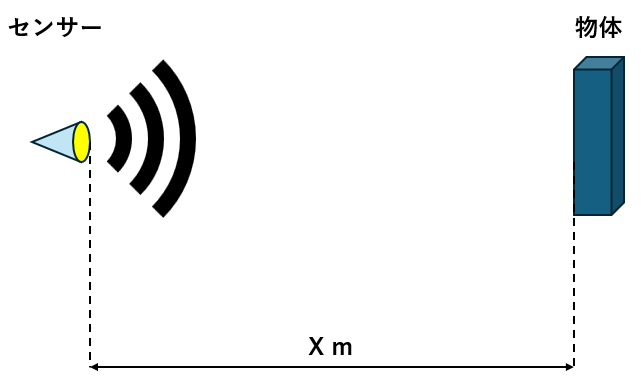
超音波センサーは音波を使います。人間には聞こえない高周波の音を発信し、反射時間から距離を測定します。
・センサーから音の波が広がる
・物体に当たって跳ね返る
・戻ってくるまでの時間を測る
という流れです。
音は光よりも広がりやすいため、
・大まかな距離検知
・障害物があるかどうか
を知る用途に向いています。
車の駐車センサーが「ピーピー」と距離を知らせるのは、この方式です。
特徴
・構造がシンプル
・低コスト
・光の影響を受けない
暗所でも問題なく動作します。
主な用途
・車の駐車支援
・簡易ロボット
・産業機器の障害物検知
弱点
・精度が高くない
・細い物体が苦手
・吸音素材に弱い
精密用途には不向きです。
3方式の違いを整理
LiDAR
→ 細い光でピンポイント測定(精密な地図作り)
ToF
→ 光で近距離を測定(顔認証・ジェスチャー)
超音波
→ 音で大まかに測定(障害物検知)
精度(どれだけ正確に距離を測れるか)
LiDAR > ToF > 超音波
- LiDAR
細いレーザーを使うため、物体の位置をかなり正確に測れます。家具の輪郭や壁の位置まで把握できるレベルです。 - ToF
赤外線を使うため実用十分な精度ですが、LiDARほどの細かさはありません。人物検知や近距離認識には十分です。 - 超音波
音は広がりやすいため、正確な位置というより「だいたいこの距離」に物体があることを検知する用途に向いています。
測定距離(どれくらい遠くまで測れるか)
LiDAR > 超音波 > ToF
- LiDAR
数メートル〜数十メートル先まで測定可能なモデルもあり、広い空間の把握が得意です。 - 超音波
数メートル程度まで安定して測れます。車の駐車支援などに十分な距離です。 - ToF
近距離測定が得意で、数十cm〜数mが主な守備範囲です。スマホの顔認証が代表例です。
コスト(導入しやすさ)
超音波 > ToF > LiDAR(安い順)
- 超音波
構造がシンプルで非常に安価。量産機器で広く使われます。 - ToF
小型で部品点数も少なく、比較的低コストで実装可能です。 - LiDAR
高精度な光学部品や回転機構を使うため、どうしても価格が上がります。
空間認識能力(周囲をどれだけ理解できるか)
LiDAR > ToF > 超音波
- LiDAR
周囲をスキャンして地図を作れるため、空間把握能力は圧倒的です。ロボット掃除機のマッピングに使われる理由です。 - ToF
空間の一部を把握するのは得意ですが、部屋全体の地図作成には向きません。 - 超音波
障害物の有無は分かりますが、形状や配置を細かく理解することはできません。
なぜ複数方式を組み合わせるのか
実際の製品では、1種類だけでなく複数センサーを併用することが一般的です。
例:ロボット掃除機
・LiDAR:マッピング
・ToF:近距離検知
・超音波:落下防止
単一方式では弱点を補えないため、役割分担が行われます。
距離センサーは機械の「目」
距離センサーは機械に視覚を与える技術です。
人間の目と違い、
・暗闇でも測定できる
・距離を数値で取得できる
・360度認識できる
といった強みがあります。
まとめ
距離センサーには明確な役割分担があります。
LiDAR:高精度マッピング
ToF:小型・近距離認識
超音波:安価な障害物検知
重要なのは「どれが優れているか」ではなく、何を実現したいかで選ぶことです。
距離センサーは、ロボットや自動化技術の進化を支える基盤です。この違いを理解すると、製品選びや技術記事の見え方も大きく変わってきます。


コメント