ロボット掃除機は、LiDARやカメラ、SLAMといった高度な技術を搭載し、年々賢くなっています。それでも「途中で止まってしまった」「充電ドックに戻れない」「地図が大きくズレた」といった“迷子”のような挙動を経験したことがある人は少なくありません。なぜ高性能なロボット掃除機でも迷子になってしまうのでしょうか。本記事では、その原因と技術的な限界を整理して解説します。
自己位置推定には必ず誤差が生じる
ロボット掃除機は、車輪の回転数や進行方向をもとに移動距離を計算しています。これを「オドメトリ」と呼びますが、床材の違いや段差、カーペットでの滑りなどにより、実際の移動距離と計算結果には少しずつ誤差が生まれます。
この誤差は一回の移動ではわずかでも、長時間の掃除や広い部屋を移動するうちに蓄積され、ロボットが認識している位置と実際の位置がズレてしまいます。これが迷子の最も基本的な原因です。
環境の変化が地図を狂わせる
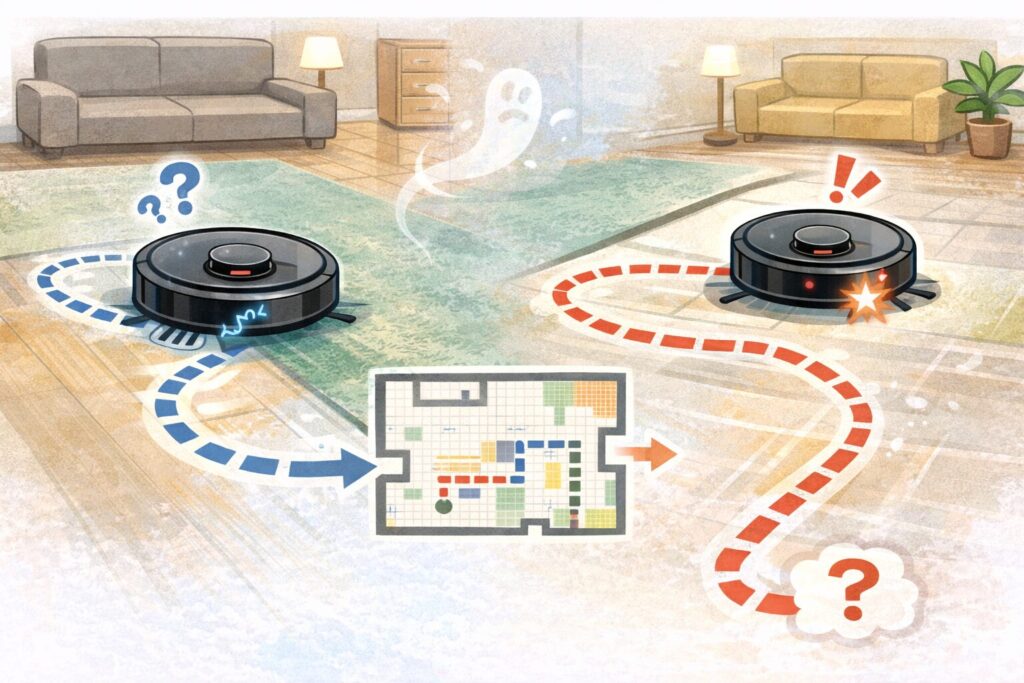
ロボット掃除機は、作成した地図を前提に行動します。しかし家庭内の環境は常に変化します。椅子の位置が変わる、床に一時的な荷物が置かれる、ドアの開閉状態が変わるといった変化は、人にとっては些細なことでも、ロボットにとっては大きな違いです。
特に家具を大きく動かした場合や、掃除中に人が頻繁に行き来する環境では、地図と現実の差が広がり、自己位置の補正が難しくなります。
センサーには得意・不得意がある
LiDARやカメラは万能ではありません。鏡やガラスのように光を反射・透過する素材は、距離測定を誤らせる原因になります。また、非常に低い家具や黒色の物体は検知しにくい場合があります。
これらのセンサー特性による誤認識が重なると、地図のズレや誤った判断につながり、迷子の原因となります。

長時間運転と再開動作の難しさ
広い住宅や複数部屋を一度に掃除する場合、ロボット掃除機は途中で充電のためにドックへ戻ります。このとき、自己位置推定にズレがあると、正確にドックの位置を認識できず、帰還に失敗することがあります。
また、充電後に掃除を再開する際も、再開地点の認識がずれると、掃除済みエリアと未掃除エリアの判別が曖昧になり、挙動が不安定になることがあります。
なぜ完全に迷子を防げないのか
工場や倉庫で使われるロボットと異なり、家庭は予測不能な変化が多い空間です。人が自由に動き、家具が動かされ、物が置かれたり片付けられたりします。
ロボット掃除機はこうした環境で動くことを前提としているため、どれだけ高性能でも100%迷子を防ぐことはできません。これは技術の未熟さというよりも、「家庭」という環境そのものが持つ特性による限界といえます。
迷子を減らすためにできる工夫
ユーザー側の使い方次第で、迷子の発生頻度を減らすことは可能です。
・掃除前に床の物を片付ける
・家具を大きく動かした後は再マッピングを行う
・進入禁止エリアを設定する
・センサーやカメラを定期的に清掃する
こうした工夫を取り入れることで、ロボット掃除機はより安定して動作します。
まとめ
ロボット掃除機が迷子になる原因は、自己位置推定の誤差、家庭環境の変化、センサーの特性など、複数の要因が重なって発生します。LiDARやSLAMといった高度な技術が搭載されていても、家庭という変化の多い空間では一定の限界があります。
仕組みを理解し、環境を整えながら使うことで、ロボット掃除機の性能を最大限に引き出すことができるでしょう。


コメント