ロボット掃除機やスマートフォン、自動運転車など、近年のスマートデバイスは驚くほど正確に動きます。その裏側で欠かせない考え方が センサーフュージョン です。名前だけ聞くと難しそうですが、実は「1つのセンサーを信用しすぎない」という、とても現実的な発想から生まれた技術です。本記事では、センサーフュージョンとは何か、なぜ必要なのか、そしてどのように使われているのかをやさしく解説します。
センサーフュージョンとは何か
センサーフュージョンとは、複数のセンサーから得られる情報を統合し、より正確な状態推定を行う考え方です。ここで重要なのは、「単純に足し合わせる」ことではありません。それぞれのセンサーの特性を理解し、得意な部分を活かし、苦手な部分を補い合うことが目的です。
現実世界はノイズや誤差に満ちています。どんなに高性能なセンサーでも、単体で完璧な情報を得ることはできません。そのため、複数の視点から同じ現象を捉え、総合的に判断する必要があるのです。
なぜ1つのセンサーでは不十分なのか
センサーはそれぞれ長所と短所を持っています。たとえば加速度センサーは、傾きや動きを検知するのが得意ですが、振動やノイズの影響を受けやすいという弱点があります。ジャイロセンサーは回転の変化を高精度で検知できますが、時間が経つにつれて誤差が蓄積する性質があります。
もしどちらか一方だけを使えば、短時間では正確でも、長時間ではズレが大きくなります。センサーフュージョンは、このズレを抑えるための合理的な解決策です。

センサーフュージョンの基本的な考え方
センサーフュージョンでは、
・短時間の変化に強いセンサー
・長時間の基準として使えるセンサー
を役割分担させます。たとえば姿勢推定では、瞬間的な回転はジャイロセンサーを信頼し、長時間の姿勢の基準は加速度センサーが検知する重力方向を用います。
これにより、滑らかで安定した状態推定が可能になります。人間が目と耳、平衡感覚を同時に使って姿勢を保っているのと似た仕組みです。

ロボット掃除機におけるセンサーフュージョン
ロボット掃除機は、センサーフュージョンの代表的な実用例です。本体内部には、加速度センサーやジャイロセンサーが搭載され、姿勢や動きを常に監視しています。
これらの情報は、LiDARやカメラといった外界センサーの情報と組み合わされます。IMU(加速度+ジャイロ)が短時間の動きを安定させ、LiDARやカメラが壁や家具を基準に位置を補正します。この役割分担があるからこそ、ロボット掃除機は長時間でも迷子になりにくいのです。

ドローンや自動車での活用
センサーフュージョンは、ドローンや自動車でも欠かせません。ドローンは空中で常に姿勢を保つ必要があり、わずかな誤差でも墜落につながります。そのため、複数のセンサー情報をリアルタイムで統合し、姿勢を制御しています。
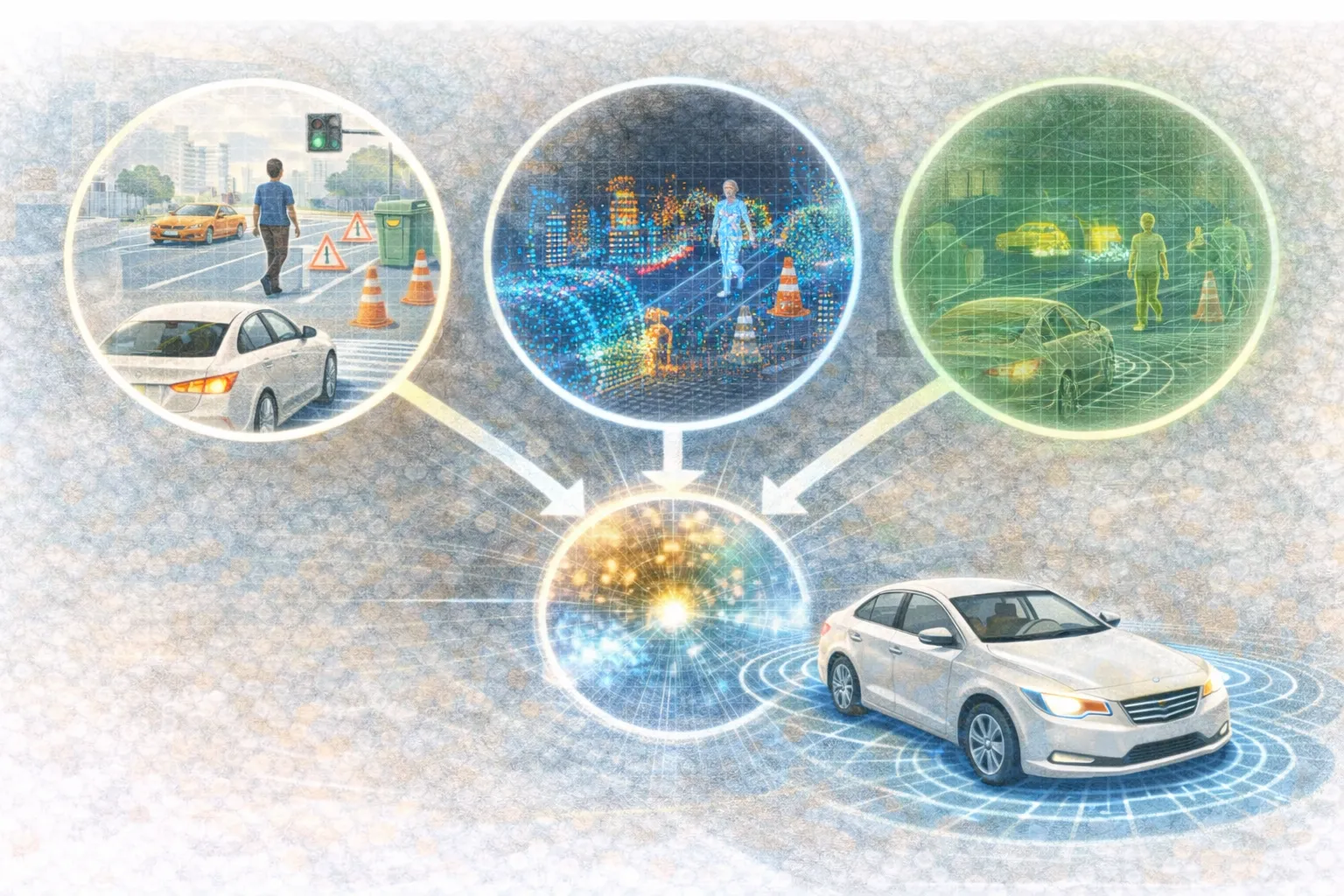
自動車では、車体の姿勢制御や運転支援機能の裏側でセンサーフュージョンが使われています。カメラ、レーダー、IMUなどを組み合わせることで、安全性を高めています。

センサーフュージョンは思想である
センサーフュージョンは、単なる技術手法ではありません。「センサーは必ず間違える」という前提に立ち、それをどう扱うかという設計思想です。完璧なセンサーを求めるのではなく、不完全な情報をどう組み合わせるかに価値があります。
この考え方は、フィジカルAI全体を支える重要な基盤でもあります。

今後のセンサーフュージョン
今後は、AIによる学習と組み合わせたセンサーフュージョンが主流になっていくと考えられています。環境や状況に応じて、どのセンサーをどれだけ重視するかを動的に変える仕組みです。
これにより、家庭用ロボットや自動運転技術はさらに柔軟で賢い存在へと進化していくでしょう。
まとめ
センサーフュージョンとは、複数のセンサー情報を統合し、不確実な現実世界を正確に理解するための考え方です。1つのセンサーを過信せず、それぞれの特性を活かすことで、高い信頼性が生まれます。
ロボット掃除機をはじめとする身近な機器の裏側では、このセンサーフュージョンが常に働いています。仕組みを知ることで、普段使っている技術をより深く理解できるようになるでしょう。


コメント